Operasi standar pada ruang-n euclides () meliputi penjumlahan vektor dan perkalian vektor dengan skalar. Selain itu, berlaku juga operasi hasil kali titik (dot product). Lalu bagaimana dengan hasil kali silang (cross product)? Dalam ruang-n euclides, cross product berlaku dengan baik di .
Supaya pembalajaran menjadi lebih bermakna, disarankan terlebih dahulu memahami :
Ternyata dari pernyataan-pernyataan di atas kita dapat 2 penulisan yang sedikit berbeda, yang pertama dengan menggunakan n-tupel barisan riil dan yang kedua dalam bentuk vektor kolom. Lalu kita harus menggunakan yang mana? Kita bebas memilih mau menggunakan cara penulisan yang pertama atau kedua. Dan untuk selanjutnya mari kita simak bersama, beberapa contoh soal yang cukup seru.
Contoh 1
Diberikan dua vektor dan di dan di yang didefinisikan sebagai berikut :
, , dan
Tentukan :
Penyelesaian :
1. Berdasarkan operasi penjumlahan vektor maka kita peroleh :
2. Masih dengan cara yang sama, kita juga dapatkan :
3. Nah pada bagian ke-3 ini cukup menarik, dimana vektor berada di sedangkan berada di lalu bagaimana hasil dari penjumlahan ?
Untuk mengetahuinya, kita representasikan vektor dan kedalam bentuk vektor kolom sebagai berikut :
dan
Cukup jelas bahwa matriks vektor mempunyai ordo sedangkan matriks vektor berordo akibatnya berdasarkan syarat penjumlahan dua buah matriks, kita peroleh :
Hal tersebut dikarenakan pada penjumlahan dua buah matriks, haruslah mempunyai ordo yang sama.
Sifat Penjumlahan Vektor
Misalkan terdapat , , dan vektor nol maka berlaku :
(Bersifat Komutatif)
(Bersifat Asosiatif)
(Sifat penjumlahan dengan vektor nol)
(Sifat penjumlahan vektor u dengan negatif atau invers dari vektor u)
Perkalian dengan Skalar
Sebuah vektor jika dikalikan dengan sembarang skalar, misal kita notasikan skalar , maka didefinisikan sebagai berikut :
Contoh 2
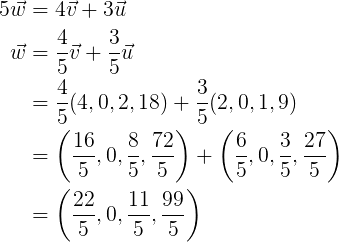
Diberikan vektor , maka tentukan vektor dan jika :
Penyelesaian :
1. Kita dapat menuliskan ulang persamaan pada soal dan melakukan substitusi pada vektor sebagai berikut :
2. Dari soal nomor 1 di atas kita punya yang kemudian dapat kita substitusikan ke persamaan pada soal nomor 2.
Sifat Perkalian dengan Skalar
Misalkan dan adalah sembarang skalar sehingga berlaku :
(Bersifat distributif)
(Sama seperti sifat sebelumnya yakni bersifat distributif)
(Bersifat asosiatif)
(Sifat perkalian dengan skalar 1)
Hasil Kali Titik (Dot Product)
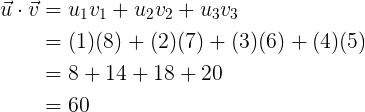
Hasil kali titik dari vektor dan adalah berupa sebuah skalar yang didefinisikan :
Dengan kata lain fungsi dot product adalah fungsi yang mengolah dua vektor di menjadi suatu skalar (real).
Contoh 3
Diberikan vektor , dan . Tentukan :
Penyelesaian :
Pertama, berdasarkan definisi hasil kali titik kita peroleh :
Kedua, berdasarkan sifat perkalian vektor dengan skalar kita peroleh :
Ketiga, karena hasil kali titik (dot product) di adalah sebuah fungsi yang mengolah atau mengkawankan dua vektor di . Maka jika di dan di akibatnya :
Jika kita perhatikan persamaan di atas, diperoleh hasil kali titik antara skalar (60) dengan vektor . Perlu diketahui bahwa :
Berdasarkan definisi hasil kali titik, dimana operan (objek yang dioperasikan) dalam fungsi dot product adalah vektor-vektor yang berada pada ruang yang sama. Sehingga karena skalar (60) adalah bilangan real yang berada pada ruang sedangkan vektor berada pada ruang akibatnya :
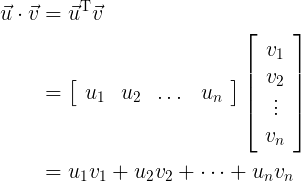
Hubungan Dot Product dengan Perkalian Matriks
Pada bagian awal, kita sudah menyinggung sedikit bahwa vektor di dapat direpresentasikan (diwakilkan) ke dalam bentuk matriks berordo .
Semisal kita punya dan di maka kita dapat menuliskannya :
dan
Sekarang kita punya definisi baru, bahwa hasil kali titik (dot product) dari vektor dan di merupakan perkalian matriks antara transpose dari dengan . Sehingga berdasarkan kaidah perkalian matriks kita peroleh :
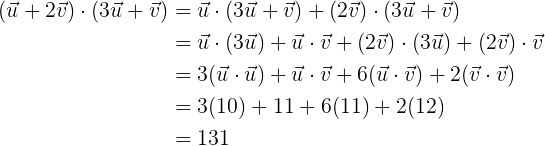
Sifat Perkalian Hasil Kali Titik
Jika , dan adalah vektor di dan adalah sembarang skalar, maka berlaku :
dan kesamaan terjadi jika
dengan adalah panjang vektor
Contoh 4
Diberikan vektor dan di dengan , dan . Tentukan nilai dari vektor jika .
Penyelesaian :
Sedikit berbeda dengan contoh-contoh sebelumnya, sekarang kita akan mencoba menyelesaikannya dengan menggunakan sifat-sifat hasil kali titik.
Langkah pertama, kita gunakan sifat kedua :
Masih dengan sifat yang sama kita jabarkan lagi menjadi :
Kemudian dilanjut dengan sifat ketiga kita peroleh :
Berdasarkan konsep vektor pada Ruang berdimensi 2 dan 3 , jika kita meninjau sebuah vektor ( misalkan ) pada maka dapat dinyatakan sebagai pasangan bilangan terurut begitu pula jika pada maka .
Sekarang bagaimana dengan vektor yang berada di , dan seterusnya? Mengenai hal ini, pada abad ke-19 para ahli matematika dan ahli fisika mengembangkannya secara analitis pada , bahkan sampai . Kenapa perlu dikembangkan? salah satunya karena pada Sistem Persamaan Linear, dimana sebuah garis dapat dikatakan sebagai vektor yang panjangnya tak terbatas, diilustrasikan sebagai berikut :
Permasalahan timbul jika pada sistem persamaan linearnya mempunyai 4, 5 bahkan sampai n variabel, lalu bagaimana dengan vektornya? itulah mengapa perlunya generalisasi konsep dari vektor atau ke ruang yang lebih tinggi. Untuk masalah visualisasi secara geometri pada ruang 4, 5 dan seterusnya. “tidak” dapat dilaksanakan. Sebab dunia dimana kita hidup hanya disusun dari konsep tiga dimensi.
Definisi Vektor di Rn
Sebuah vektor di didefinisikan sebagai n-tupel bilangan riil dengan n adalah bilangan bulat positif. Contohnya pada vektor dan pada vektor .
Jika kita perhatikan pada gambar sebelumnya, jelas bahwa pasangan dan tripel tidak hanya bermakna sebagai vektor namun juga dapat berperan sebagai titik. Nah, uniknya dalam ruang-n euclides keduanya dianggap sama, hal ini berlaku juga pada , sampai dengan . Jadi kita bebas menggambarkannya sebagai titik maupun sebagai vektor di .
Contoh :
Vektor tersebut berada di .
Jika kita perhatikan seksama, sering muncul istilah ruang-n euclides, lalu apa sih ruang-n euclides itu ? Secara geometri, ruang euclides adalah ruang 2 atau 3 dimensi dimana aksioma-aksioma geometri euclid berlaku dengan baik, yang kemudian digeneralisasi ke dalam ruang berdimensi n. Sedangkan secara analitis, himpunan semua n-tupel bilangan real dinamakan ruang-n dan dinyatakan .
Himpunan semua bilangan real
Himpunan semua pasangan bilangan real
Himpunan semua tripel bilangan real
Himpunan semua quadrupel bilangan real
Himpunan semua n-tupel bilangan real
Vektor Nol di Rn
Sebuah vektor di disebut sebagai vektor nol jika dan hanya jika semua entri yang didalamnya bernilai nol, biasa dituliskan sebagai berikut :
Untuk selanjutnya akan dibahas pada halaman lain mengenai operasi-operasi vektor di ruang-n euclid . Namun sebelumnya pastikan bahwa anda sudah mengenal lebih dahulu operasi-operasi vektor pada Ruang-2 dan Ruang-3.
Vektor dalam matematika adalah sebuah objek yang mempunyai panjang (besar/nilai) dan arah. Kita dapat menggambarkannya sebagai panah atau segmen garis lurus yang terarah di \(R^{2}\) (Ruang 2 / Ruang dimensi 2) atau \(R^{3}\) (Ruang 3 / Ruang dimensi 3).
Ilustrasi Vektor di Ruang 2Ilustrasi Vektor di Ruang 3
Pada gambar di atas arah panah menunjukan arah vektor dan panjang panah menyatakan besarnya. Ekor panah dinamakan titik awal (initial point) dan ujung panah dinamakan titik akhir (terminal point) dari vektor.
Ilustrasi dalam Kehidupan Nyata
Pernahkah kalian bermain layang-layang?
Pada saat kita bermain layang-layang, kita perhatikan posisi layang-layang saat terbang jarang sekali berada lurus tepat di atas kita, hal ini dikarenakan pengaruh vektor sehingga kita dapat melihat layang-layang dengan lebih jelas.
Notasi Vektor (Cara Penulisannya)
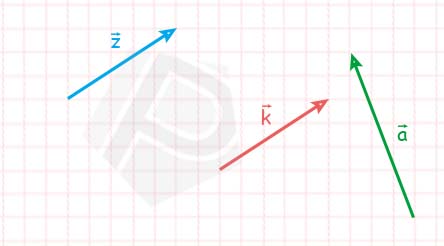
Penulisan vektor dalam matematika dapat dinyatakan dalam huruf kecil tebal misalnya a, k dan z. Namun pada kenyataanya tangan kita tidak terbiasa menulis tebal-tipis huruf sehingga akan sedikit merepotkan, sehingga ada alternatif penulisan lainnya yakni \(\vec{a}, \vec{k}\) dan \(\vec{z}\).
Selain itu masih ada lagi, misalkan kita punya vektor \(\vec{v}\) dengan titik awalnya adalah \(A\) dan titik akhirnya adalah \(B\) maka kita dapat tuliskan :
$$\vec{v}=\vec{AB}$$
Catatan 1: Dua vektor atau lebih dikatakan sama jika dan hanya jika arah dan panjangnya sama. Pada gambar di atas vektor \(\vec{k}\) dan \(\vec{z}\) sama, atau \(\vec{k}=\vec{z}\) sebab memiliki arah dan panjang yang sama, walaupun letaknya berbeda.
Operasi Vektor
Jika sebelumnya penggambaran vektor dari sudut pandang geometri. Nah, sekarang karena pembahasannya sudah sampai operasi vektor maka kita akan coba bahas konsep vektor secara analitis. Sehingga nantinya kita juga mendapatkan konsep penjumlahan, pengurangan, perkalian vektor secara analitis.
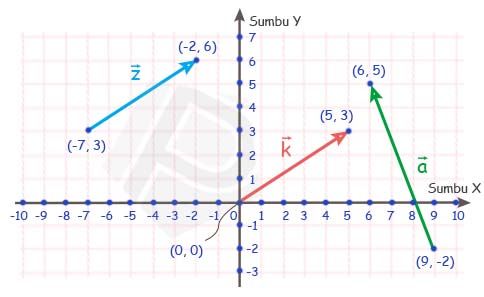
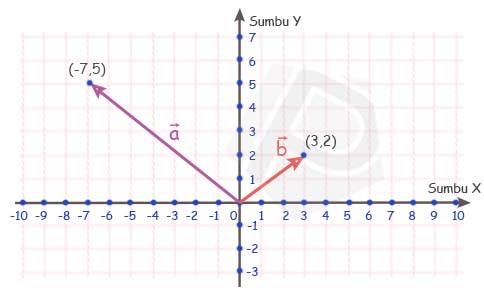
Mari kita perhatikan vektor berikut :
Pada gambar di atas kita dapat menyatakan vektor \(\vec{a}=(-3, 7), \vec{k}=(5, 3)\) dan \(\vec{z}=(5, 3)\).
Kok bisa?
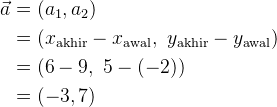
Yaps, secara analitis jika kita punya vektor \(\vec{v}\) berada pada ruang-2 (ruang dimensi 2 atau kita gunakan bidang kartesius) maka kita dapat menuliskannya :
Contohnya pada gambar di atas, vektor \(\vec{a}\) mempunyai titik awal di titik \((9, -2)\) dan titik akhir di titik \((6,5)\) sehingga berdasarkan persamaan di atas maka \(a\) dapat kita tuliskan :
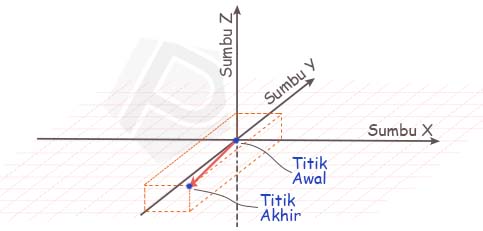
Kemudian bagaimana jika vektornya berada pada ruang-3 (ruang dimensi 3) ?
Jangan khawatir, hal tersebut tidak jauh berbeda dengan konsep yang di ruang-2. Misalkan kita punya \(\vec{v}\) dengan
Titik awal
Titik Akhir
Ilustrasi :
Ilustrasi Vektor Di Ruang 3
Maka dapat kita tuliskan :
Catatan 2 : Apabila \(\vec{v}\) adalah sebuah vektor yang titik awalnya di titik pusat koordinat (Contoh pada ruang-2 \((0,0)\)) maka \(\vec{v}\) biasa disebut sebagai vektor posisi.
Nah, sudah ada gambaran kan? Pemahaman ini akan kita gunakan pada operasi vektor selanjutnya.
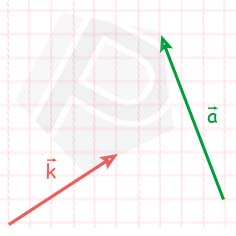
Misalkan kita punya vektor \(\vec{a}\) dan \(\vec{k}\) :
Berapa nilai dari \(\vec{k}+\vec{a}\) ?
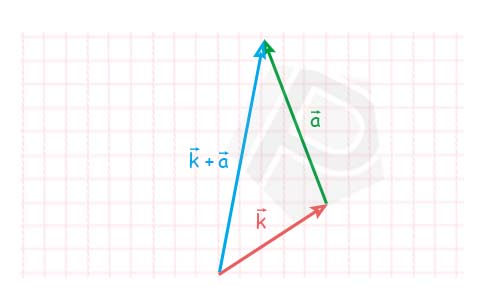
Secara geometri dalam penjumlahan vektor dapat dilakukan dengan cara menggeser vektor \(\vec{a}\) sehingga titik awal \(\vec{a}\) berhimpit dengan titik akhir \(\vec{k}\).Hasil penjumlahan \(\vec{k}+\vec{a}\) berupa vektor yang dinyatakan oleh panah biru dengan titik awal \(\vec{k}\) dan titik akhir akhir \(\vec{a}\).
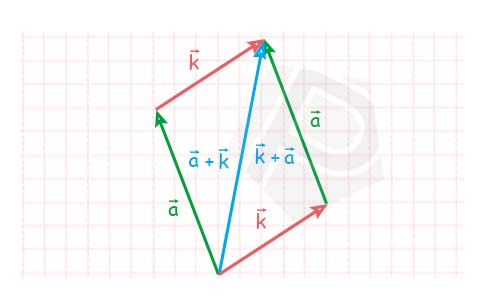
Selain itu, kita juga dapat menggunakan metode jajaran genjang. Yaps sesuai namanya, kita akan membentuk sebuah jajaran genjang dimulai dengan menggeser vektor \(\vec{k}\) sehingga titik awal \(\vec{k}\) berhimpit dengan titik akhir \(\vec{a}\).
Berdasarkan gambar di atas kita peroleh sifat operasi penjumlahan vektor :
Catatan 3 : Perlu diingat bahwa suatu vektor dalam matematika akan selalu sama (tidak berubah) jika arah dan panjangnya tetap, walaupun posisinya berubah.
Kemudian secara analitis jika punya vektor \(\vec{a}=(a_{1},a_{2})\) dan \(\vec{b}=(b_{1}, b_{2})\) maka berlaku :
Begitu pula jika vektor \(\vec{c}=(c_{1},c_{2},c_{3})\) dan \(\vec{d}=(d_{1},d_{2},d_{3})\) di ruang-3 maka berlaku :
Contoh 1
Misalkan kita punya vektor \(\vec{a}\) dan \(\vec{b}\) sebagai berikut :
Tentukan hasil dari \(\vec{a}+\vec{b}\)
Penyelesaian :
Secara geometri kita geser vektor \(\vec{b}\) sehingga titik awal vektor \(\vec{b}\) berhimpit dengan titik akhir \(\vec{a}\) dan kita peroleh :
Sedangkan secara analitis maka :
Sehingga kita peroleh :
Perkalian Vektor dengan Skalar (Hasilnya Berupa Vektor)
Wah.. kok habis operasi penjumlahan vektor tidak ke operasi pengurangan vektor? Sebab operasi perkalian vektor dengan skalarlah yang nantinya mendasari operasi pengurangan vektor.
Sebelumnya mari kita perhatikan ilustrasi berikut :
Mula-mula terdapat sebuah batang korek api, kemudian kita perbanyak jumlahnya menjadi 3 batang korek api dan kita susun menjadi :
Sehingga sekarang panjangnya menjadi 3 kali panjang semula. Nah, sama halnya dengan vektor.
Misalkan kita punya vektor \(\vec{a}\) dan skalar \(k\) maka hasil kali \(k\vec{a}\) sepanjang \(|k|\) (nilai mutlak \(k\)) dikali panjang \(\vec{a}\).
Kenapa ada nilai mutlaknya?
Sebab dalam konsep vektor, jika \(k\) bernilai negatif maka hasil kali \(k\vec{a}\) mempunyai arah yang berlawanan dengan \(\vec{a}\). Untuk lebih jelasnya perhatikan gambar berikut :
Kemudian jika \(|k|<1\) maka panjang \(k\vec{a}\) lebih pendek dibanding panjang \(\vec{a}\) (disebut juga pemampatan) dan jika \(|k|>1\) maka panjang \(k\vec{a}\) lebih panjang dibanding panjang \(\vec{a}\) (disebut juga perenggangan).
Secara analitis jika \(\vec{c}=(c_{1},c_{2})\) di ruang-2 dan \(\vec{b}=(b_{1},b_{2},b_{3})\) di ruang-3 dan \(k\) adalah sembarang skalar, maka berlaku :
dan juga
Contoh 2
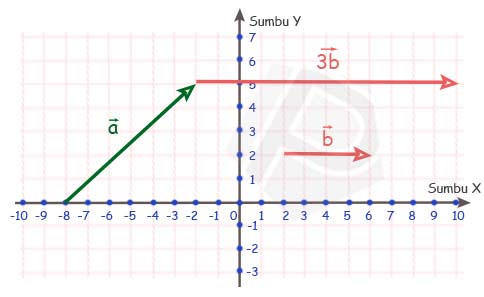
Misalkan vektor \(\vec{a}\) dan \(\vec{b}\) didefinisikan sebagai berikut :
Tentukan hasil dari \(\vec{a}+3\vec{b}\)
Penyelesaian :
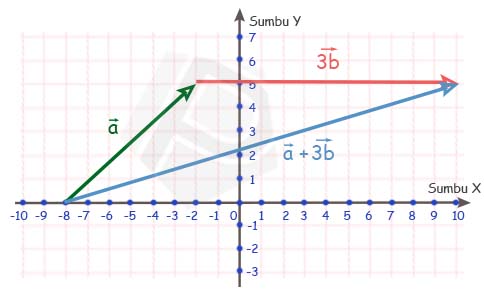
Secara geometri maka :
Kemudian kita gunakan sifat operasi penjumlahan sehingga kita peroleh :
Mudah bukan?
Jika menyelesaikannya secara analitis maka dapat kita tuliskan :
Sehingga berdasarkan sifat operasi penjumlahan vektor dan perkalian vektor dengan skalar maka kita dapatkan :
Pengurangan Vektor (Hasilnya Berupa Vektor)
Jika kita punya dua sembarang vektor \(\vec{a}\) dan \(\vec{b}\) maka pengurangan \(\vec{a}\) dengan \(\vec{b}\) dapat kita tuliskan :
Sehingga secara analitis kita punya :
Jika kedua vektor tersebut pada ruang-2 maka :
Jika kedua vektor tersebut pada ruang-3, dengan cara yang sama maka :
Sengaja untuk penggambaran secara geometri tidak disertakan, sebab kita akan meninjaunya langsung pada contoh soal berikut.
Contoh 3
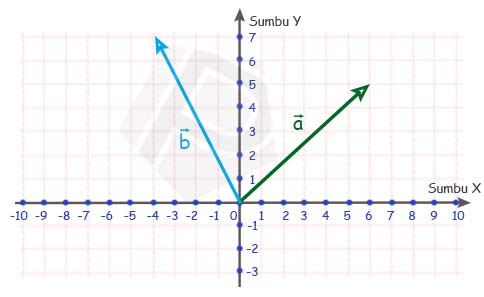
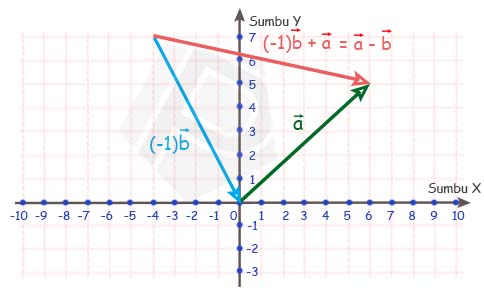
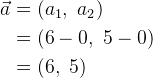
Misalkan diberikan dua buah vektor di ruang-2 yang didefinisikan sebagai berikut :
Tentukan hasil dari \(\vec{a}-\vec{b}\)
Penyelesaian :
Ingat kembali bahwa jika suatu vektor dikali dengan skalar yang bernilai negatif maka hasil perkaliannya berupa vektor yang arahnya berlawanan dengan vektor yang dikalikan.
Sedangkan secara analitis kita peroleh :
dan juga
Sehingga berdasarkan sifat operasi pengurangan vektor, kita peroleh :
Perkalian Vektor dengan Vektor
Operasi ini terbagai menjadi 2 bagian, pertama Perkalian Titik (dotproduct) dan yang kedua adalah Perkalian Proyeksi dalam Vektor (cross product).
Kedua bagian tersebut berkaitan dengan sudut dan panjang dalam vektor, dimana yang diartikan sudut antara vektor \(\vec{a}\) dan \(\vec{b}\) adalah sudut yang dihasilkan oleh \(\vec{a}\) dan \(\vec{b}\) setelah titik awal \(\vec{a}\) dan titik awal \(\vec{b}\) diimpitkan. Sudut dapat kita tulis \(\theta\) dengan \(0\leq\theta\leq\pi\).
Kemudian panjang vektor dalam matematika disebut juga norma (norm). Contohnya panjang vektor dari \(\vec{a}\) ditulis \(\|\vec{a}\|\).
Jika \(\vec{a}\) berada pada ruang-2 atau \(\vec{a}=(a_{1}, a_{2})\) maka
Jika \(\vec{a}\) berada pada ruang-3 atau \(\vec{a}=(a_{1}, a_{2},a_{3})\) maka
Catatan 4 : Dalam konsep vektor terdapat vektor nol dinotasikan \(\vec{0}\) dan didefinisikan sebagai vektor yang mempunyai panjang nol (\(\|\vec{0}\|=0\)) dengan arah sembarang yang bersesuaian dengan operasi yang mengikutinya. Secara geometri vektor nol dapat digambarkan sebagai sebuah titik.
Catatan 5 : Selain itu, terdapat vektor satuan yaitu vektor yang panjangnya 1. Pada pelajaran fisika, vektor biasa ditulis : (contoh)
\(\vec{a}=3\hat{i}+5\hat{j}\)
Nah, \(\hat{i}\) dan \(\hat{j}\) merupakan vektor satuan. Asalkan bukan vektor nol, kita dapat mencari vektor satuan dari sebuah vektor. Contohnya vektor \(\vec{b}\neq\vec{0}\), maka vektor satuannya yakni :
\(\hat{b}=\frac{\vec{b}}{\|\vec{b}\|}\)
1. Dot Product (Hasilnya Berupa Skalar)
Jika \(\vec{a}\) dan \(\vec{b}\) berada dalam ruang-2 atau ruang-3 dan \(\theta\) adalah sudut antara keduanya, maka perkalian titik (dot product) didefinisikan sebagai berikut :
Contoh 5
Tentukan hasil kali titik antara vektor \(\vec{a}=(3,0)\) dengan \(\vec{b}=(3,3\sqrt{3})\) dan sudut antara kedua vektor tersebut sebesar \(60^{\circ}\).
Secara geometri dapat kita gambarkan :
Sedangkan secara analitis :
Pada contoh di atas jika kita perhatikan bahwa dalam menghitung perkalian titik masih terikat dengan sudut antar dua vektor yang diketahui. Bayangkan jika yang diketahui hanya posisi vektornya saja, maka kita harus cari sudutnya terlebih dahulu.
Nah, untuk mengatasi permasalahan ini mari kita cari bentuk lain dari perkalian titik yang lebih mudah perhitungannya.
Perhatikan gambar berikut :
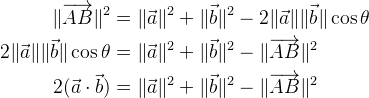
Berdasarkan aturan cosinus didapat :
Dengan mensubtitusikan
Maka akan kita peroleh bentuk lain dari perkalian titik :
Untuk kasus di ruang 3 dengan cara serupa kita dapatkan :
Dengan rumus ini dalam menghitung perkalian titik tidak perlu mencari sudut terlebih dahulu.
Sebagai latihan, coba selesaikan contoh soal ke-5 dengan metode di atas.
Sifar-Sifat Hasil Kali Titik (Dot Product)
\(4.\) Jika vektor \(\vec{a}\neq\vec{0}\) dan \(\vec{b}\neq\vec{0}\) dan sudut antara kedua vektor tersebut adalah \(\theta\) maka berlaku :
\(\theta\) adalah sudut lancip jika dan hanya jika \(\vec{a}\cdot\vec{b}>0\)
\(\theta\) adalah sudut tumpul jika dan hanya jika \(\vec{a}\cdot\vec{b}<0\)
\(\theta\) adalah sudut siku-siku jika dan hanya jika \(\vec{a}\cdot\vec{b}=0\)
(Bersifat asosiatif)
(Bersifat distributif)
untuk sembarang skalar \(k\).
didasari Pertidaksamaan Cauchy-Schwarz.
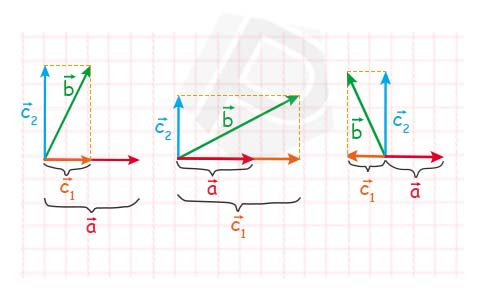
Proyeksi Vektor
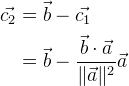
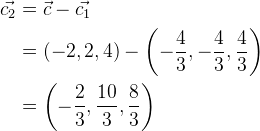
Menentukkan proyeksi vektor dalam matematika dibutuhkan konsep perkalian titik untuk menguraikan vektor (Dekomposisi Vektor) \(\vec{b}\) menjadi dua vektor dengan ketentuan satu vektor sejajar dengan \(\vec{a}\neq\vec{0}\) yakni vektor \(\vec{c_{1}}\) sedangkan vektor yang lainnya yakni \(\vec{c_{2}}\) tegak lurus dengan \(\vec{a}\).
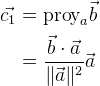
Dari gambar di atas kita peroleh hubungan :
Vektor \(\vec{c_{1}}\) disebut proyeksi ortogonal \(\vec{b}\) pada \(\vec{a}\) dan beberapa sumber referensi menuliskannya sebagai :
Sedangkan vektor \(\vec{c_{2}}\) disebut juga komponen vektor \(\vec{b}\) yang ortogonal (tegak lurus) terhadap \(\vec{a}\).
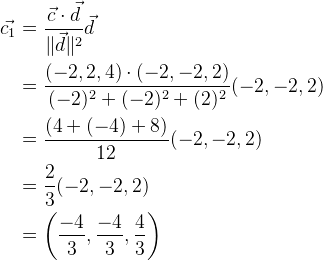
Contoh 6
Jika diketahui vektor \(\vec{c}=(-2,2,4)\) dan \(\vec{d}=(-2,-2,2)\), tentukan komponen vektor \(\vec{c}\) yang sejajar dengan \(\vec{d}\) dan tentukan komponen \(\vec{c}\) yang tegak lurus dengan \(\vec{d}\).
Penyelesaian :
Misalkan \(c_{1}\) adalah komponen vektor yang sejajar dengan \(\vec{d}\) dan \(\vec{c_{2}}\) adalah komponen vektor yang tegak lurus dengan \(\vec{d}\), maka kita peroleh hubungan :
\(\vec{c}=\vec{c_{1}}+\vec{c_{2}}\)
dimana
dan
Catatan 6 : Dalam konsep proyeksi vektor di atas, vektor satuan dari \(\vec{c_{1}}\) dinotasikan \(\hat{c_{1}}\) sama dengan vektor satuan dari \(\vec{b}\) dinotasikan \(\hat{b}\).
2. Cross Product (Hasilnya Berupa Vektor)
Akhirnya kita sudah sampai pada bagian akhir dari pembahasan kali ini, dimana pada operasi perkalian silang (cross product) mempunyai kontribusi yang cukup besar dalam geometri, fisika (momen gaya/torsi) dan ilmu-ilmu teknik.
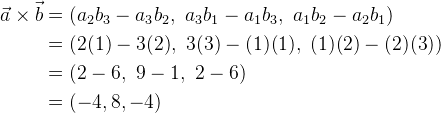
Perkalian silang dua vektor \(\vec{a}=(a_{1},a_{2},a_{3})\) dan \(\vec{b}=(b_{1},b_{2},b_{3})\) dalam ruang-3 dinotasikan \(\vec{a}\times\vec{b}\) dan didefinisikan :
Operasi ini sangat berguna jika kita diminta mencari sebuah vektor yang tegak lurus pada dua buah vektor yang lain dalam ruang-3. Contohnya pada persamaan di atas, hasil kali perkalian silang \(\vec{a}\times\vec{b}\) adalah vektor yang tegak lurus dengan \(\vec{a}\) dan \(\vec{b}\).
Contoh 7
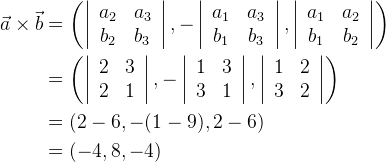
Misalkan \(\vec{a}=(1,2,3),~\vec{b}=(3,2,1)\) maka tentukan hasil dari \(\vec{a}\times\vec{b}\).
Penyelesaian :
Cara pertama (menggunakan persamaan pertama)
Cara kedua dengan menggunakan konsep determinan matriks :
Sifat-Sifat Cross Product
(Tidak komutatif)
(Bersifat distributif)
(Bersifat distributif)
(Bersifat asosiatif, dengan sembarang skalar \(k\))
(Identitas Lagrange)
(Penjabaran dari Identitas Lagrange)
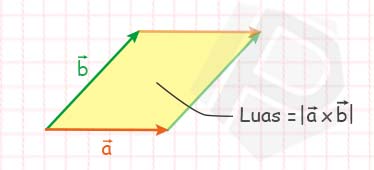
Catatan 7 : Pada sifat ke-10 di atas, nilai dari \(\|\vec{a}\times\vec{b}\|\) sama dengan luas jajaran genjang yang dibentuk oleh \(\vec{a}\) dan \(\vec{b}\).
Selanjutnya direkomendasikan membaca materi lanjutan mengenai Vektor di Ruang-n Euclides (Ruang berdimensi n).
Kenapa sih kita harus belajar sifat-sifat determinan?
Untuk mengetahui alasannya, mari kita umpamakan nilai determinan yang kita cari ibarat sebuah layang-layang yang nyangkut di pucuk pohon yang penuh dengan cabang dan sifat-sifat determinan sebagai tangga.
Nah, dari sini ada dua opsi utama untuk mendapatkan layang-layang tersebut, yaitu pertama dengan memanjat pohonnya langsung (menghitung determinan dengan cara umum seperti ekspansi kofaktor atau lainnya) dan opsi kedua menggunakan tangga untuk naik ke atas pohon tersebut.
Kedua pilihan tersebut sama-sama dapat mengambil layangan, namun akan lebih efisien dan efektif jika kita menggunakan bantuan tangga untuk naik pohon dan mendapatkan layangan tersebut.
Dari perumpamaan di atas, kita dapat mempermudah perhitungan dalam mencari determinan dengan memanfaatkan sifat-sifat determinan sebagai berikut :
Sifat 1
Jika matriks \(A\) dan \(B\) adalah matriks persegi yang berordo sama maka
Cara pertama : Jika pada contoh 3, kita telah menggunakan metode sarrus. Sekarang kita akan menggunakan metode ekspansi kofaktor pada kolom pertama \((a_{11}=\pi,a_{21}=0,a_{31}=0)\).
(Ekspansi kofaktor sepanjang baris ketiga dari \(B\))
Cara kedua dengan memanfaatkan sifat determinan, maka kita cukup mencermati baris-baris dan kolom-kolom pada matriks \(A\) dan \(B\), karena pada matriks \(A\) terdapat satu kolom (kolom kedua) yang semua entri-entrinya bernilai nol sehingga berdasarkan sifat ke-7 maka \(\text{det}(A)=0\) begitu pula pada matriks \(B\) karena terdapat satu baris (baris ketiga) yang entri-entrinya bernilai nol maka \(\text{det}(B)=0\).
Sifat 8
Jika \(A\) adalah matriks persegi dengan memuat dua baris yang saling berkelipatan atau dua kolom yang saling berkelipatan, maka
Cara Alternatif yakni dengan memperhatikan baris-baris dan kolom-kolomnya, apabila terdapat dua baris atau dua kolomnya berkelipatan contohnya pada matriks \(A\), dimana baris ketiga merupakan kelipatan dari baris pertama. Sehingga berdasarkan sifat ke-8 ini maka \(\text{det}(A)=0\).
Sifat 9
Misalkan \(A_{1},A_{2},\dots A_{n}\) dan \(B\) adalah matriks persegi yang berordo sama yang hanya berbeda dalam satu baris tunggal, anggaplah perbedaan terletak pada baris ke-\(k\) kemudian kita misalkan lagi bahwa baris ke-\(k\) dari \(B\) diperoleh dengan menambahkan entri-entri yang bersesuaian dalam setiap baris ke-\(k\) dari \(A_{i}\) dengan \(i=\{1,2,3,\dots,n\}\), sehingga berlaku :
Persamaan di atas juga berlaku jika \(A_{1},A_{2},\dots A_{n}\) dan \(B\) hanya berbeda dalam satu kolom tunggal, dengan kolom yang berbeda (misalkan ke-\(j\)) dari B diperoleh dengan menambahkan entri-entri yang bersesuaian dari setiap kolom ke-\(j\) dari matriks \(A_{i}\).
Contoh 9
Misalkan matriks \(A, B\) dan \(C\) didefinisikan sebagai berikut :
Untuk cara perhitungannya bisa menggunakan aturan sarrus atau ekspansi kofaktor dan proses perhitungannya sengaja tidak ditampilkan, untuk latihan bersama.
Sifat 10
Misalkan \(A\) adalah matriks persegi, kemudian \(A\) kita kenakan Operasi Baris Elementer maka berlaku :
Jika \(A^{*}\) diperoleh dari \(A\) dengan cara mengalikan satu baris dari \(A\) dengan sembarang bilangan \(k\neq0\), maka \(\boxed{\text{det}\left({A^{*}}\right)=k\times \text{det}(A)}\)
Jika \(A^{*}\) diperoleh dari \(A\) dengan cara menukar dua baris, maka \(\boxed{\text{det}\left({A^{*}}\right)=-\text{det}(A)}\)
Jika \(A^{*}\) diperoleh dari \(A\) dengan cara menjumlahkan satu baris dengan kelipatan baris lain, maka \(\boxed{\text{det}\left({A^{*}}\right)=\text{det}(A)}\)
Untuk contohnya akan kita akan bahas bersama pada bagian selanjutnya. Pada bagian selanjutnya kita akan mengenal metode yang tak kalah unik dalam mencari nilai determinan yaitu metode reduksi baris.
Umumnya pada saat kita menghitung determinan dari suatu matriks persegi, kita menggunakan tiga metode pokok yaitu :
Metode kupu-kupu (Khusus untuk matriks \(2\times2\))
Metode Sarrus (Khusus untuk matriks \(3\times3\))
Metode Ekspansi Kofaktor
Selain ketiga metode di atas terdapat metode lain yang dapat digunakan dalam mencari determinan yaitu metode reduksi baris, dimana dalam prosesnya menerapkan operasi baris elementer untuk mengarahkan kedalam bentuk matriks yang sederhana (dapat berupa matriks segitiga, diagonal, eselon baris atau lainnya) tujuannya agar mempermudah dalam menghitung determinannya.
Dalam metode ini tidak ada langkah baku, namun jika kita mengacu pada sifat determinan terutama sifat ke-4 , maka kita punya acuan untuk mereduksi baris sedemikian sehingga terbentuk matriks segitiga.
Menghitung Determinan dengan Metode Reduksi Baris
Perhatikan ilustrasi metode reduksi pada matriks \(3\times 3\) sebagai berikut :
Catatan : Pada ilustrasi di atas, persamaan \(\text{det}(A)=\text{det}(A^{*})=y_{11}\times y_{22}\times y_{33}\) belum tentu benar, namun kita dapat memastikan persamaan tersebut bernilai benar dengan “selalu” menggunakan satu jenis operasi baris elementer, yaitu : menambahkan satu baris dengan kelipatan baris lainnya.
Contoh 11
Tentukan determinan dari matriks \(A\) dengan \(A\) didefinisikan sebagai berikut :
Ingat, tujuan kita membentuk matriks segitiga (atas atau bawah) sehingga kita sederhanakan baris pertama dan kedua dengan operasi \(-6R_{3}+R_{1}\rightarrow R_{1}\) dan \(-5R_{3}+R_{2}\rightarrow R_{2}\).
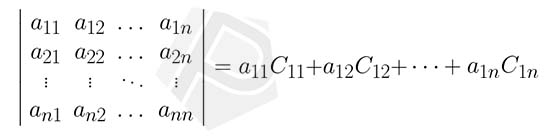
Pada pembahasan sebelumnya sudah dijelaskan dengan jelas mengenai Definisi Fungsi Determinan dengan Perkalian Elementer. Dimana jika terdapat \(A\) matriks persegi berordo \(n\times n\) maka determinan dari matriks \(A\) dapat ditulis sebagai berikut :
Dengan \(a_{1p_{1}}a_{2p_{2}}\dots a_{np_{n}}\) bernilai genap jika \((p_{1},p_{2},\dots,p_{n})\) merupakan permutasi genap, sebaliknya \(a_{1p_{1}}a_{2p_{2}}\dots a_{np_{n}}\) bernilai ganjil jika \((p_{1},p_{2},\dots,p_{n})\) merupakan permutasi ganjil. Ingat kembali bahwa permutasi dari \(n\) unsur berbeda dari \((p_{1},p_{2},\dots,p_{n})\) mempunyai \(n!\) permutasi.
Kita akan menggunakan definisi fungsi determinan dengan perkalian elementer untuk melihat apakah metode sarrus hanya berlaku pada matriks \(3\times3\). Sebelum menganalisa lebih lanjut, mari kita kenalan terlebih dahulu metode sarrus.
Apa itu aturan atau metode sarrus?
Metode sarrus atau juga sering orang menyebutnya metode anyaman (Basketweave Method) adalah jalan alternatif dalam menghitung determinan dari matriks \(3\times 3\).
Perhatikan ilustrasi berikut :
Berdasarkan ilustrasi di atas kita peroleh langkah-langkah menghitung determinan matriks \(3\times 3\) dengan metode sarrus sebagai berikut.
Tahapan Metode Sarrus dalam Mencari Determinan
Misalkan didefinisikan matriks \(A_{3\times 3}\) sebagai berikut :
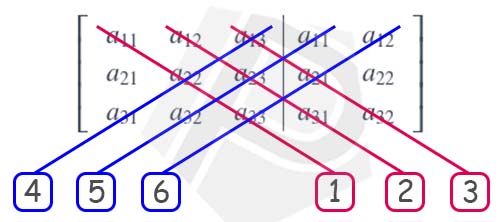
Langkah pertama dalam menentukan determinan dengan aturan sarrus yaitu dengan menambahkan secara berurutan kolom ke-\(1\) dan ke-\(2\) pada sebelah kanan kolom ke-\(3\).
Selanjutnya kita coret entri-entri pada diagonal utama dan diagonal lainnya.
Sehingga diperoleh 6 bagian, kemudian kita kalikan entri-entri yang terletak pada kotak 1 sampai kotak 6.
$$\boxed{1}=a_{11}\times a_{22}\times a_{33}$$
$$\boxed{2}=a_{12}\times a_{23}\times a_{31}$$
$$\boxed{3}=a_{13}\times a_{21}\times a_{32}$$
$$\boxed{4}=a_{13}\times a_{22}\times a_{31}$$
$$\boxed{5}=a_{11}\times a_{23}\times a_{32}$$
$$\boxed{6}=a_{12}\times a_{21}\times a_{33}$$
Langkah terakhir yaitu menghitung determinan dengan mengurangkan jumlah hasil kali pada diagonal-diagonal utama(kotak 1, kotak 2 dan kotak 3) dengan jumlah hasil kali pada diagonal-diagonal pelengkapnya(kotak 4, kotak 5 dan kotak 6).
Alasan Metode Sarrus Hanya Berlaku Pada Matriks 3×3
Sebenarnya mengenai alasan aturan sarrus hanya berlaku pada matriks 3×3 tidak perlu ditanyakan, mengapa?
Hal ini karena Metode Sarrus itu sendiri diciptakan sebagai jalan alternatif yang lebih mudah untuk menghitung determinan matriks 3×3.
Namun, penulis mempunyai pandangan yang sedikit berbeda mengenai hal tersebut. Pertama kita sepakati bersama bahwa dalam mencari determinan matriks \(A_{n\times n}\) dengan metode sarrus pada diskusi kita kali ini dimulai dengan menambahkan \(n-1\) kolom pertama tepat pada sebelah kanan kolom terakhir secara berturut-turut.
Ide tersebut terinspirasi pada aturan sarrus pada matriks \(3\times 3\) dimana tepat pada sebalah kanan kolom terakhir (ketiga), terdapat \(3-1\) kolom pertama (kolom ke-\(1\) dan kolom ke-\(2\) secara berturut-turut).
Sehingga jika kita hubungkan pada konsep hasil perkalian elementer maka kita akan mendapatkan \(2n\) buah hasil perkalian elementer. Contohnya pada matriks \(3 \times 3\) berdasarkan aturan sarrus maka akan terdapat \(2\times3=6\) buah hasil kali elementer (3 pada diagonal utama dan 3 lainnya pada diagonal pelengkapnya).
Namun, jika kita mengacu pada definisi determinan dengan hasil perkalian elementer maka apabila matriks \(A\) berordo \(n\times n\), maka seluruh hasil perkalian elementer dalam matriks ada sebanyak \(n!\) (baca sebabnya disini).
Sehingga dari kedua pernyataan di atas kita peroleh hubungan :
$$n!=2n$$
Jelas bahwa jika bilangan asli \(n>3\) maka $$n!>2n$$ (kontradiksi) yang berakibat \(1\leq n\leq 3\) dan nilai \(n\) yang memenuhi persamaan tersebut hanya \(n=3\).
Jadi dari pernyataan di atas dapat kita tarik kesimpulan bahwa aturan sarrus hanya berlaku untuk matriks berordo \(3\times 3\).
Metode ekspansi kofaktor adalah suatu metode untuk menghitung determinan dengan menggunakan kofaktor yang mengutamakan kemampuan berhitung secara manual dan secara teoritis.
Lalu apa itu kofaktor?
Metode SarrusMetode Kupu-Kupu
Sebelum mengenal apa itu kofaktor, mari kita ingat kembali pada saat duduk di bangku SMA kita sudah mengenal dan memahami aturan sarrus (untuk matriks 3×3) dan metode kupu-kupu (untuk matriks 2×2).
Perhatikan contoh berikut :
Didefinisikan matriks \(A\) dan \(B\) sebagai berikut :
Dari pernyataan di atas bahwa determinan matriks \(B\) dapat dicari dengan menggunakan determinan matriks yang lebih kecil, begitu pula pada matriks \(A\).
Kemudian pada contoh di atas tanpa kita sadari, juga telah menerapkan konsep kofaktor, untuk lebih jelasnya, berikut definisi kofaktor :
Definisi Kofaktor : Jika \(A_{n\times n}=\left[{a_{ij}}\right]\) maka kofaktor dari \(a_{ij}\) dapat lambangkan \(C_{ij}\) dan \(C_{ij}=(-1)^{i+j}M_{ij}\), dengan \(M_{ij}\) menyatakan minor dari \(a_{ij}\) dan \(M_{ij}\) adalah determinan dari submatriks \(A\) yang diperoleh dengan mencoret semua entri pada baris ke-\(i\) dan semua entri pada kolom ke-\(j\).
Selanjutnya kita akan menghitung determinan suatu matriks persegi dengan menerapkan konsep ekspansi kofaktor.
Menghitung Determinan dengan Metode Ekspansi Kofaktor
Determinan dari matriks \(A_{n\times n}=\left[{a_{ij}}\right]~\forall~i,j =\{1,2,3,\dots,n\}\) dapat dihitung dengan mengalikan entri-entri dalam suatu baris atau dalam suatu kolom dengan kofaktor-kofaktornya. Kemudian menjumlahkan semua hasil-hasil kali yang dihasilkan, atau dapat ditulis :
1. Dapat diterapkan pada matriks persegi 2×2 atau lebih.
Jika metode sarrus terbatas pada ordo \(3 \times 3\) maka untuk menghitung determinan dengan ordo yang lebih tinggi \((4\times 4, 5\times5,\dots,n\times n)\) dapat menggunakan metode ekspansi kofaktor.
Kenapa dimulai dari matriks 2×2 ?
Hal ini karena pada matriks 1×1 dalam mencari determinannya cukup menggunakan definisi saja, dimana jika terdapat matriks \(A_{1\times1}=\left[a_{11}\right]\) maka determinannya adalah \(\text{det}(A)=a_{11}\).
2. Efektif untuk yang suka perhitungan manual dan secara teoritis.
Hal ini didapat dari perbandingan dengan metode lainnya seperti aturan sarrus dan reduksi baris, dimana masing-masing mempunyai kelebihan tersendiri. Ekspansi kofaktor juga sekaligus dapat melatih ketahanan dalam berhitung, kita ambil contoh pada saat mencari determinan \(A_{5\times 5}\) maka kita akan menemukan determinan dari submatriks dari \(A\) yang berukuran \(4 \times 4\), dimana determinan dari submatriks tersebut kita hitung juga dengan ekspansi kofaktor sehingga akan ditemukan determinan submatriks dari submatriks \(A\) yang berukuran \(3 \times 3\) dan seterusnya.
Asalkan paham konsep dari ekspansi kofaktor dan mempunyai hitungan yang tepat maka metode ekspansi kofaktor akan efektif dilakukan.
3. Konsep kofaktor berguna untuk mencari invers matriks.
Pada saat duduk dibangku SMA pasti sudah mengenal rumus mencari invers berikut :
Dari kenyataan tersebut, jelas bahwa konsep kofaktor dapat dimanfaatkan untuk mencari invers matriks. Sehingga tidak ada salahnya mempelajari ekspansi kofaktor, namun disamping itu metode ekspansi kofaktor menurut penulis masih terdapat kekurangan.
Kekurangan Metode Ekspansi Kofaktor
Menurut penulis metode ekspansi kofaktor dalam segi kecepatan masih kurang jika dibandingkan dengan metode campuran yaitu gabungan dari macam-macam metode(sarrus, kupu-kupu, ekspansi kofaktor, reduksi baris dan lainnya) yang dipadukan dengan sifat-sifat determinan.
Pada postingan ini kita tidak akan membahas mengenai metode reduksi baris. Sehingga sekarang untuk membuktikan argumen tersebut, saya asumsikan kita sudah memahami metode reduksi baris.
Contoh 3 :
Misalkan kita akan menghitung determinan matriks \(A\) sebagai berikut :
Pada umumnya kita sering melihat fungsi-fungsi seperti \(f(x)=x^2+2x+1\) yang memetakan \((x)\) bilangan real ke bilangan real \(f(x)\). Dari hal tersebut, kemudian para matematikawan mulai melakukan penelitian untuk mencari fungsi yang mengasosiasikan suatu matriks \(X\) dengan bilangan real \(f(x)\). Sehingga munculah fungsi determinan yang nantinya dapat diterapkan dalam mencari invers matriks.
Seki Kowa atau Seki Takakazu adalah matematikawan asal jepang yang pertama kali menemukan determinan, namun masih terbatas pada ordo \(2\times 2\) dan \(3 \times 3\). Akan tetapi muridnya yaitu Laplace berhasil menemukan determinan untuk matriks dengan ordo yang lebih tinggi. Sedangkan istilah “Determinan” pertama kali digunakan oleh Gauss dalam buku berjudul Disquistiones Arithmeticae.
Definisi Fungsi Determinan
Jika \(A\) adalah matriks persegi maka determinan dari matriks \(A\) dapat ditulis \(\text{det}(A)\) atau \(\left|{A}\right|\) yang didefinisikan sebagai jumlahan semua hasilperkalian elementer bertanda dari \(A\).
Lalu apa itu hasil perkalian elementer bertanda?
Eits.. Sebelumnya kita harus mengetahui konsep permutasi terlebih dahulu, karena secara tak langsung merupakan hal penting yang berhubungan dengan hasil perkalian elementer atau bisa dikatakan pondasi dasarnya.
Konsep Permutasi
Pada saat kita duduk dibangku sekolah menengah atas (SMA), kita sudah dikenalkan apa itu permutasi beserta contohnya.
Nah sekarang kita akan sedikit mengulasnya kembali, dimulai dari definisi permutasi hingga pengembangannya.
Permutasi dari himpunan bilangan bulat positif \(\{1,2,\dots,n\}\) adalah susunan bilangan-bilangan bulat ini dengan suatu aturan “tanpa menghilangkan” atau “tanpa mengulangi” bilangan-bilangan tersebut.
Contoh 1
Didefinisikan himpunan bilangan-bilangan bulat sebagai berikut :
$$\{1,2,4,5\}$$
Tentukan permutasi dari himpunan di atas?
Penyelesaian :
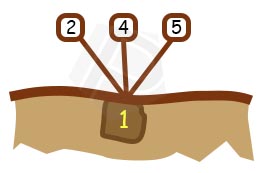
Ingat tujuan kita adalah mencari susunan berbeda dari bilangan-bilangan bulat pada himpunan di atas tanpa mengulangi dan menghilangkan bilangan-bilangan itu. Salah satu susunannya adalah \((4, 1, 5, 2)\) sedangkan susunan \((2,2,1,5)\) tidak termasuk, karena mengulangi unsur yakni angka \(2\). Lalu bagaimana caranya kita mencari semua susunan yang lainnya?
Untuk mempermudah mencarinya, kita akan menggunakan Pohon Permutasi.
Wah.. semakin menarik ada pohon di matematika. Untuk caranya, perhatikan langkah-langkah berikut :
Langkah 1 :
Kita mulai dari unsur pertama dari kanan yakni angka \(1\). kemudian kita letakkan angka \(1\) di dalam biji pohon.
Langkah 2 :
Unsur atau bilangan selain yang ada didalam lingkaran yaitu \(2, 4\) dan \(5\) (ada \(3\) bilangan maka kita dapat \(3\) cabang baru). Kemudian setiap cabang kita isikan secara berturut-turut angka \(2, 4\) dan \(5\).
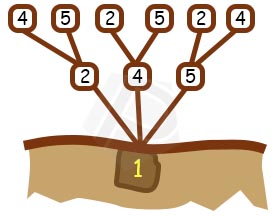
Langkah 3 :
Perhatikan pada cabang pertama (dari kiri) unsur paling atas adalah angka \(2\) sedangkan di bawahnya angka \(1\). Sehingga unsur yang belum ada pada cabang pertama adalah angka \(4\) dan \(5\) (ada \(2\) bilangan maka kita dapat \(2\) anak cabang pada cabang pertama). Kemudian setiap anak cabang pertama kita isikan secara berturut-turut angka \(4\) dan \(5\).
Langkah 4 :
Kita lakukan hal yang sama pada cabang kedua dan ketiga, sehingga kita peroleh :
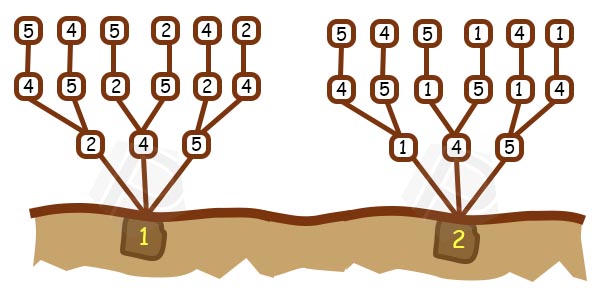
Langkah 5 :
Kita buat anak cabang lagi pada ujung cabang yang sudah ada, dan kenapa harus buat lagi? Kita ambil contoh salah satu cabang (merah), jelas bahwa bilangan yang terhubung dengan cabang merah yakni angka \(1, 2\) dan \(4\) karena permutasi dari \((1,2,4,5)\) terdiri dari \(4\) unsur maka haruslah membuat \(1\) anak cabang lagi pada cabang merah dan pada ujung anak cabang merah kita isikan angka \(5\) (selain \(1, 2\) dan \(4\)). Kemudian tidak lupa kita lakukan hal yang sama pada cabang-cabang lainnya.
Langkah 6 :
Ingat karena himpunan pada soal memiliki \(4\) unsur/bilangan maka juga akan mempunyai \(4\) pohon permutasi. Sehingga dengan menerapkan cara yang sama dari langkah-\(1\) sampai langkah ke-\(4\) kita peroleh \(3\) pohon lainnya.
Langkah 7 :
Selanjutnya kita nyatakan setiap ranting pada pohon sebagai suatu susunan, berikut caranya :
Jadi dari 4 pohon kita dapatkan 24 susunan sebagai berikut :
Pohon ke \(1\)
Pohon ke \(2\)
Pohon ke \(3\)
Pohon ke \(4\)
\((1,2,4,5)\)
\((2,1,4,5)\)
\((4,1,2,5)\)
\((5,1,2,4)\)
\((1,2,5,4)\)
\((2,1,5,4)\)
\((4,1,5,2)\)
\((5,1,4,2)\)
\((1,4,2,5)\)
\((2,4,1,5)\)
\((4,2,1,5)\)
\((5,2,1,4)\)
\((1,4,5,2)\)
\((2,4,5,1)\)
\((4,2,5,1)\)
\((5,2,4,1)\)
\((1,5,2,4)\)
\((2,5,1,4)\)
\((4,5,1,2)\)
\((5,4,1,2)\)
\((1,5,4,2)\)
\((2,5,4,1)\)
\((4,5,2,1)\)
\((5,4,2,1)\)
Catatan
Pada umumnya terdapat cara praktis untuk mencari “banyaknya permutasi/susunan” dari beberapa unsur dalam suatu himpunan yaitu dengan menggunakan Filling Slot (Metode Pengisian Tempat).
Misalkan terdapat himpunan dengan \(k\) unsur, maka kita dapat mencari banyaknya permutasi dari himpunan tersebut dengan mendefinisikan sebuah “ruang” yang terdiri dari \(k\) slot (ada sebanyak \(k\) bagian) sebagai berikut :
\(\boxed{~^~}_{i}\) menyatakan banyaknya kemungkinan unsur yang menempati slot/kotak ke-\(i\) dengan \(i=\{1,2,\dots,k\}\). Sehingga kita dapat menghitung banyaknya permutasi dengan rumus :
Banyaknya kemungkinan unsur untuk menempati kotak ke-\(1\) ada \(4\) kemungkinan yaitu \(1,2,4\) atau \(5\). Kemudian banyaknya kemungkinan kotak ke-\(2\) ada \(3\) kemungkinan, mengingat satu unsur telah ditempatkan pada kotak ke-\(1\) begitu pula untuk kotak ke-\(3\) dan ke-\(4\) berturut-turut mempunyai \(2\) dan \(1\) kemungkinan, Sehingga kita dapat mencari banyaknya permutasi :
Misalkan didefinisikan \((p_{1}, p_{2},\dots,p_{k})\) sebagai permutasi dari himpunan dengan \(k\) unsur bilangan bulat. Contohnya jika kita punya himpunan \(\{1,2,3\}\) maka salah satu permutasinya adalah \((3,1,2)\) dengan \(p_{1}=3, p_{2}=1\) dan \(p_{3}=2\).
Dalam permutasi \((p_{1}, p_{2},\dots,p_{k})\), dikatakan terjadi sebuah inversi (inversion) apabila sebuah bilangan bulat yang lebih besar mendahului sebuah bilangan bulat yang lebih kecil, atau dapat kita katakan terjadi inversi jika terdapat \(p_{i}>p_{j}\) dengan \(i<j\) dan \(i,j \in \{1,2,\dots,k\}\).
Contoh 2
Tentukan banyaknya inversi dalam permutasi \((4,1,2,0,5)\) ?
Penyelesaian :
Pertama kita cermati banyaknya bilangan bulat yang lebih kecil daripada \(p_{1} = 4\), dapat kita lihat jelas terdapat \(3\) bilangan yang lebih kecil yakni \(p_{2}=1, p_{3}=2\) dan \(p_{4}=0\).
Langkah kedua kita lakukan hal yang sama untuk \(p_{2}=1, p_{3}=2, p_{4}=0\) dan \(p_{5}=5\), kemudian jumlahkan seluruh inversinya. Lebih jelasnya perhatikan tabel berikut :
Unsur
Lebih Besar Dari
Jumlah
\(p_{1}=4\)
\(p_{2}, p_{3}, p_{4}\)
4
\(p_{2}=1\)
\(p_{4}\)
1
\(p_{3}=2\)
\(p_{4}\)
1
\(p_{4}=0\)
Tidak ada
0
\(p_{5}=5\)
Tidak ada
0
Banyaknya Inversi
6
Definisi 3 (Permutasi Genap dan Ganjil)
Sebuah permutasi \((p_{1}, p_{2},\dots,p_{k})\) dinamakan permutasi genap (even) jika jumlah inversi dalam permutasi tersebut genap. Sebaliknya, sebuah permutasi dinamakan ganjil (odd) jika jumlah inversi dalam permutasi tersebut ganjil.
Contoh 3
Permutasi \((2,5,0,3)\) adalah permutasi ganjil karena banyaknya inversi \(1 + 2 + 0 + 0 = 3\) (ganjil)
Definisi Hasil Perkalian Elementer
A matriks persegi \(n \times n\) dan kita tuliskan sebagai berikut:
Maka hasil perkalian elementer dari matriks A adalah hasil perkalian elemen-elemen pada A yang letaknya sebaris atau sekolom. Semisal \(A=[a_{ij}]_{3 \times 3}\) maka salah satu hasil perkalian elementernya yaitu \(a_{12}a_{23}a_{32}\).
Lalu bagaimana cara mencari semua hasil perkalian elementer?
Untuk lebih jelasnya simak contoh berikut :
Contoh 4
Didefinisikan matriks persegi \(A\) dengan ordo \(3 \times 3\) sebagai berikut :
Karena matriks A mempunyai ordo \(3 \times 3\) maka kita tuliskan bentuk acuan perkalian elementernya sebagai perkalian \(3\) elemen pada matriks A yakni \(a_{1p_{1}}a_{2p_{2}}a_{3p_{3}}\). Kemudian kita ganti tanda \(p_{1}, p_{2}\) dan \(p_{3}\) dengan seluruh permutasi dari \((1,2,3)\). Kenapa 1, 2 dan 3? karena kotak \(p_{1}, p_{2}\) dan \(p_{3}\) mewakili urutan kolom dan banyaknya kolom pada matriks A ada \(3\), yaitu kolom ke-\(1, 2\) dan \(3\). Untuk lebih jelasnya perhatikan tabel di bawah ini :
Permutasi \((1,2,3)\)
Ubah \(a_{1p_{1}}a_{2p_{2}}a_{3p_{3}}\)
\((1,2,3)\)
\(a_{11}a_{22}a_{33}\)
\((1,3,2)\)
\(a_{11}a_{23}a_{32}\)
\((2,1,3)\)
\(a_{12}a_{21}a_{33}\)
\((2,3,1)\)
\(a_{12}a_{23}a_{31}\)
\((3,1,2)\)
\(a_{13}a_{21}a_{32}\)
\((3,2,1)\)
\(a_{13}a_{22}a_{31}\)
Catatan
Apabila matriks \(A\) berordo \(n\times n\), maka seluruh hasil perkalian elementer dalam matriks ada sebanyak \(n!\). Karena banyaknya hasil kali elementer sama dengan banyaknya permutasi dari \((p_{1}, p_{2},\dots,p_{n})\) yaitu dengan menggunakan metode filling slot didapat banyaknya permutasi = \(n(n-1)\dots (2)(1)= n!\).
Hasil Perkalian Elementer Bertanda untuk Mencari Determinan
Sedikit berbeda dari sebelumnya, hasil perkalian elementer bertanda dari matriks \(A\) persegi yang berordo \(n \times n\) adalah hasil perkalian elementer \(a_{1p_{1}}a_{2p_{2}}\dots a_{np_{n}}\) yang dikalikan dengan \(+1\) jika permutasinya genap dan dikalikan dengan \(-1\) jika permutasinya ganjil.
Contoh 5
Berdasarkan contoh \(4\) tentukan semua hasil perkalian elementer bertandanya.
Penyelesaian :
Untuk mempermudah mencari hasil perkalian elementer bertanda, kita kembangkan tabel pada contoh \(4\) sehingga :
Permutasi
Inversi
Hasil Perkalian Elementer Bertanda
\((1,2,3)\)
0
\(+a_{11}a_{22}a_{33}\)
\((1,3,2)\)
1
\(-a_{11}a_{23}a_{32}\)
\((2,1,3)\)
1
\(-a_{12}a_{21}a_{33}\)
\((2,3,1)\)
2
\(+a_{12}a_{23}a_{31}\)
\((3,1,2)\)
2
\(+a_{13}a_{21}a_{32}\)
\((3,2,1)\)
3
\(-a_{13}a_{22}a_{31}\)
Lalu apa hubungannya dengan fungsi determinan?
Jadi jika \(A\) adalah matriks persegi yang berordo \(n\times n\) maka Determinan/Fungsi Determinan didefinisikan sebagai jumlahan semua hasil perkalian elementer bertanda dari matriks \(A\). Atau bisa ditulis :
Pada pembahasan sebelumnya, kita sudah mengenal tentang Definisi Matriks Elementer dan Sifatnya. Nah sekarang ini kita akan membahas lebih lanjut mengenai kegunaan dari matriks elementer.
Dalam mencari invers suatu matriks selain menggunakan adjoint, kita juga bisa menggunakan konsep gabungan antara matriks elementer dan metode eliminasi gauss-jordan.
Lalu bagaimana caranya ?
Eits.. Sebelum kita tahu caranya, kita harus tahu konsep dasarnya dulu. Pertama kita cari tahu sifat-sifat matriks invers.
Sifat-sifat Matriks Invers
Definisi 1
Jika \(A\) adalah matriks persegi, dan jika terdapat matriks \(B\) sehingga \(AB=BA=I\) maka matriks \(A\) dikatakan dapat dibalik (invertible) dan \(B\) disebut juga invers dari \(A\) atau dapat ditulis \(B=A^{-1}\).
Teorema 1 (Sifat dari Matriks Invers)
Jika matriks \(A\) dapat dibalik maka \(A^{-1}\) dapat dibalik dan berlaku :
$$(A^{-1})^{-1}=A$$
Bukti : Matriks \(A\) dapat dibalik sehingga berdasarkan definisi 1 maka \(AA^{-1}=A^{-1}A=I\) dan karena \(A^{-1}\) dapat dibalik maka \((A^{-1})^{-1}=A\).
Jika \(A\) matriks yang dapat dibalik dan \(c\) adalah skalar yang tidak sama dengan nol, maka \(cA\) dapat dibalik dan berlaku :
$$(cA)^{-1}=\frac{1}{c}A^{-1}$$
Bukti : Berdasarkan definisi 1, pembuktian bagian ini equivalen dengan cukup membuktikan persamaan \((cA)(\frac{1}{c}A^{-1})=(\frac{1}{c}A^{-1})(cA)=I\). Sehingga berdasarkan sifat-sifat operasi matriks kita peroleh :
Kemudian dengan cara yang sama kita peroleh \((\frac{1}{c}A^{-1})(cA)=I\dots(ii)\) sehingga dari persamaan \((i)\) dan \((ii)\) kita dapatkan \((cA)(\frac{1}{c}A^{-1})=(\frac{1}{c}A^{-1})(cA)=I\), sesuai yang diminta.
Jika matriks \(A\) dan \(B\) dapat dibalik dan memiliki ordo yang sama, maka \(AB\) dapat dibalik dan berlaku :
$$(AB)^{-1}=B^{-1}A^{-1}$$
Bukti : Kita gunakan cara yang seperti sebelumnya yaitu berdasarkan definisi 1, kita cukup membuktikan bahwa \((AB)(B^{-1}A^{-1})=(B^{-1}A^{-1})(AB)=I\), perhatikan persamaan berikut :
Kemudian dengan cara yang sama kita peroleh \((B^{-1}A^{-1})(AB)=I\dots(ii)\) sehingga dari persamaan \((i)\) dan \((ii)\) kita dapatkan \((AB)(B^{-1}A^{-1})=(B^{-1}A^{-1})(AB)=I\), sesuai yang diminta.
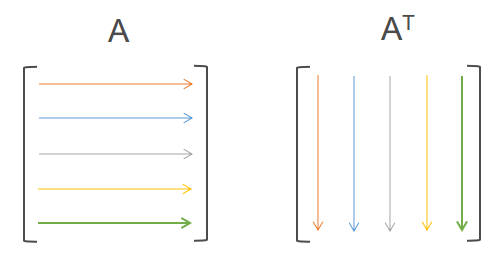
Jika A adalah matriks yang dapat dibalik, maka \(A^{T}\) (Transpose Matriks) dapat dibalik dan berlaku :
Kemudian dengan cara yang sama kita peroleh \(A^{T}(A^{-1})^{T}=I\dots(ii)\) sehingga dari persamaan \((i)\) dan \((ii)\) kita dapatkan \((A^{-1})^{T}A^{T}=A^{T}(A^{-1})^{T}=I\), kemudian berdasarkan definisi 1, didapat \((A^{T})^{-1}=(A^{-1})^{T}\).
Jika matriks \(A\) dapat dibalik dan \(c\) adalah bilangan bulat tak negatif maka \(A^{c}\) dapat dibalik dan berlaku :
Kemudian dengan cara yang sama kita peroleh \((A^{-1})^{c}A^{c}=I\dots(ii)\) sehingga dari persamaan \((i)\) dan \((ii)\) kita dapatkan \(A^{c}(A^{-1})^{c}=(A^{-1})^{c}A^{c}=I\), sehingga berdasarkan definisi 1, kita dapatkan \((A^{c})^{-1}=(A^{-1})^{c}\).
Corollary 1 : Akibat dari teorema 1 bagian (c), jika \(A_{1},~A_{2},\dots,~A_{k}\) adalah matriks-matriks persegi dengan ordo yang sama dan dapat dibalik, maka hasil kali matriks-matriks tersebut \((A_{1}A_{2}\dots A_{k})\) juga dapat dibalik atau dapat ditulis :
Teorema 2 (Teorema Dasar untuk Matriks yang Invertible)
Jika \(A\) adalah matriks persegi \(n \times n\) kemudian \(\vec{x}\) dan \(\vec{b}\) adalah vektor kolom \(n\times 1\), maka pernyataan-pernyataan berikut saling ekuivalen (semuanya benar atau semuanya salah).
Matriks \(A\) bersifat invertible (dapat dibalik).
\(A\vec{x}=\vec{b}\) mempunyai solusi unik untuk setiap \(\vec{b} \in \mathbb{R}^{n}\).
Bentuk eselon baris tereduksi dari matriks \(A\) adalah matriks satuan \(I_{n\times n}\).
\(A\) dapat dinyatakan sebagai hasil kali beberapa matriks elementer.
Bukti :
Untuk membuktikan pernyataan-pernyataan di atas saling ekuivalen, kita cukup membuktikan rantai implikasi berikut : \((a)\Rightarrow(b)\Rightarrow(c)\Rightarrow(d)\Rightarrow(e)\Rightarrow(a)\).
Langkah 1
\((a)\Rightarrow(b)\), karena \(A\) dapat dibalik maka berlaku \(A(A^{-1}\vec{b})=(AA^{-1})\vec{b}=I\vec{b}=\vec{b}\), kemudian kita dapat mengatur \(\vec{x}=A^{-1}\vec{b}\) yang merupakan solusi dari persamaan \(A\vec{x}=\vec{b}\). Lalu kita pastikan bahwa solusi dari persamaan tersebut tunggal yakni \(\vec{x}=A^{-1}\vec{b}\). Kita mulai dari persamaan awal :
$$A\vec{x}=\vec{b}$$
$$\Leftrightarrow A^{-1}A\vec{x}=A^{-1}\vec{b}$$
$$\Leftrightarrow I\vec{x}=A^{-1}\vec{b}$$
$$\Leftrightarrow \vec{x}=A^{-1}\vec{b}$$
Sehingga jelaslah bahwa penulisan \(\vec{x}=A^{-1}\vec{b}\) bersifat tunggal.
Langkah 2
\((b)\Rightarrow(c)\), berdasarkan pernyataan \((b)\) dengan mengatur \(\vec{b}=\vec{0}\) maka kita dapatkan solusi tunggal yaitu :
Jadi persamaan \(A\vec{x}=\vec{0}\) hanya mempunyai solusi trivial \(\vec{x}=\vec{0}\).
Langkah 3
\((c)\Rightarrow(d)\), pada pembahasan sebelumnya mengenai SIstem Persamaan Linear Homogen, kita tahu bahwa persamaan \(A\vec{x}=\vec{0}\) dapat kita tuliskan sebagai berikut :
$$a_{11}x_{1}+a_{12}x_{2}+\dots+a_{1n}x_{n} =0$$
$$a_{21}x_{1}+a_{22}x_{2}+\dots+a_{2n}x_{n} =0$$
$$\vdots$$
$$a_{n1}x_{1}+a_{n2}x_{2}+\dots+a_{nn}x_{n} =0$$
Kemudian kita representasikan kedalam bentuk matriks :
Karena solusi dari persamaan \(A\vec{x}=\vec{0}\) tunggal, maka hanya mempunyai pemecahan trivial \(x_{1}=0,~x_{2}=0,\dots,~x_{n}=0\). Sehingga jika kita gunakan eliminasi gauss jordan kita akan mendapatkan bentuk eselon baris tereduksi sebagai berikut :
Dari bentuk terakhir di atas dapat kita simpulkan bahwa \(A\) dapat direduksi menjadi \(I_{n\times n}\) dengan menggunakan operasi baris elementer.
Langkah 4
\((d)\Rightarrow(e)\Rightarrow(a)\), berdasarkan \((d)\) bahwa \(A\) dapat direduksi menjadi \(I_{n\times n}\) dengan urutan berhingga dari operasi-operasi baris elementer (kita misalkan terdapat \(k\) kali OBE).
Kemudian jika didefinisikan \(L_{i}\) menyatakan operasi baris elementer yang dilakukan pada urutan ke-\(i\) dengan \(i=\{1,2,\dots,k\}\). Maka kita dapat mencari matriks elementer \(E_{1},~E_{2},\dots,~E_{k}\) sebagai berikut :
$$I\xrightarrow[]{L_{1}}E_{1}$$
$$I\xrightarrow[]{L_{2}}E_{2}$$
$$\vdots$$
$$I\xrightarrow[]{L_{k}}E_{k}$$
Mengingat kembali jika matriks elementer \(E\) dihasilkan dengan melakukan satu kali Operasi Baris Elementer(OBE) tertentu pada matriks identitas \(I_{n\times n}\). Kemudian jika OBE yang sama dikenakan pada sebarang matriks \(B_{n\times m}\) maka hasilnya akan sama dengan hasil kali \(EB\), lihat contohnya disini.
Sehingga berdasarkan pernyataan di atas, jika matriks \(A\) kita kenakan OBE dari urutan ke-\(1\) sampai ke-\(k\) secara berturut-turut, maka kita peroleh hubungan :
Karena bentuk eselon baris tereduksi dari \(A\) adalah \(I_{n\times n}\) maka \(E_{k}\dots E_{2}E_{1}A=I_{n\times n}\dots(*)\). Kemudian karena matriks elementer dapat dibalik dan inversnya berupa matriks elementer, maka dengan mengalikan kedua ruas persamaan \((*)\) dengan matriks elementer \(E_{k}^{-1},\dots,~E_{2}^{-1},~E_{1}^{-1}\) secara berturut-turut didapat :
Karena \(A\) dapat dinyatakan sebagai hasil kali matriks-matriks elementer yang dapat dibalik maka dapat disimpulkan \(A\) dapat dibalik. Untuk melihat lebih jelas, kita gunakan corollary 1 sehingga didapat :
JIka kita perhatikan persamaan \((**)\) maka kita dapat memperoleh \(A^{-1}\) dengan mengalikan \(I_{n\times n}\) dari sebelah kiri berturut-turut dengan \(E_{1},~E_{2},\dots,~E_{k}\). Kemudian berdasarkan persamaan \((*)\) dan \((**)\) maka dapat kita simpulkan bahwa urutan langkah-langkah OBE yang dilakukan pada \(A\) akan membawa kebentuk matriks satuan \(I_{n \times n}\) dan langkah-langkah yang sama jika dikenakan pada matriks satuan \(I_{n \times n}\) akan menghasilkan \(A^{-1}\). Untuk lebih jelasnya dapat kita tuliskan sebagai berikut :
Perlu diingat bahwa tujuan kita adalah mereduksi matriks \(A\) (biru) sehingga membentuk eselon baris tereduksi, maka kita akan menggunakan metode gauss-jordan dengan OBE.
Karena pada baris pertama sudah terdapat 1 utama, maka kita sederhanakan baris ke-\(2\) dengan operasi \(-7R_{1}+R_{2}\rightarrow R_{2}\) sehingga kita peroleh :
Kita perhatikan baris ketiga (biru) terdapat baris bilangan nol, akibatnya \(A\) tidak dapat dibentuk menjadi matriks satuan sehingga berdasarkan teorema 2, akibatnya \(A\) tidak dapat dibalik.
Matriks elementer adalah matriks persegi \(n \times n\) yang dinyatakan sebagai hasil matriks satuan \(n \times n\) yang dikenakan sebuah operasi baris elementer.
Lalu bagaimana cara membentuk matriks elementer ?
Mengingat kembali dalam Operasi Baris Elementer (OBE) terdapat 3 operasi dasar, sehingga kita peroleh 3 cara untuk membuat matriks elementer yaitu :
Dengan operasi mempertukarkan dua baris pada matriks satuan, dinotasikan : \(R_{i} \leftrightarrow R_{j}\)
Contoh :
Misalkan kita punya matriks satuan \(I_{3 \times 3}\) dan kita akan menggunakan operasi \(R_{1} \leftrightarrow R_{3}\), sehingga kita dapatkan matriks elementer (merah) :
Mengalikan sebuah baris dengan konstanta/skalar, selama skalar bukan nol, dinotasikan : \(kR_{i} \rightarrow R_{1}\)
Contoh :
Jika kita punya matriks \(I_{2 \times 2}\) dan dikenakan operasi \(-\frac{\sqrt{3}}{2}R_{2} \rightarrow R_{2}\) maka kita peroleh matriks elementer sebagai berikut :
Setelah mengetahui definisi dan bentuk matriks elementer selanjutnya kita akan mempelajari sifat-sifatnya melalui teorema-teorema berikut. Catatan : Untuk selanjutnya untuk penamaan matriks elementer kita akan menggunakan simbol \(E\).
Teorema 1
Misalkan \(E\) adalah matriks elementer yang dibentuk dengan melakukan sebuah operasi baris elementer tertentu pada \(I_{n\times n}\) (matriks satuan). Jika operasi baris elementer yang sama dikenakan pada sebarang matriks \(A_{n\times m}\) maka hasilnya sama dengan hasil kali \(EA\).
Contoh penerapan dari teorema 1 :
Misalkan didefinisikan matriks \(A\) dan \(E\) sebagai berikut :
Dari persamaan \((i)\) dan \((ii)\), ditarik kesimpulan bila kita mengenakan OBE \(3R_{3}+R_{1}\rightarrow R_{1}\) pada matriks A maka hasilnya akan sama dengan hasil kali \(EA\). Jadi pernyataan \(A \xrightarrow[ ]{3R_{3}+R_{1}\rightarrow R_{1}} EA\) bernilai benar.
Tambahan
Mari kita berpikir bersama, sebuah OBE yang dikenakan pada matriks satuan \(I\) dapat menghasilkan matriks elementer \(E\).
Lalu apakah ada OBE yang jika dikenakan pada matriks \(E\) akan menghasilkan matriks satuan \(I\) ?
Jawabannya adalah ada!
Misalkan jika \(E\) kita peroleh dengan menukarkan baris ke-\(i\) dengan baris ke-\(j\) pada \(I\), maka kita dapat mencari matriks \(I\) jika kita menukarkan baris ke-\(j\) dengan baris ke-\(i\) pada \(E\).
Untuk operasi lainnya simak tabel berikut :
OBE pada \(I\) yang menghasilkan \(E\)
OBE pada \(E\) yang menghasilkan \(I\)
Mempertukarkan baris ke-\(i\) dengan baris ke-\(j\), dinotasikan : \(R_{i} \leftrightarrow R_{j}\)
Mempertukarkan baris ke-\(j\) dengan baris ke-\(i\), dinotasikan : \(R_{j} \leftrightarrow R_{i}\)
Mengalikan baris ke-\(i\) dengan skalar \(k\), \(k\neq 0\) dan dinotasikan : \(kR_{i} \rightarrow R_{i}\)
Mengalikan baris ke-\(i\) dengan skalar \(\frac{1}{k}\), dinotasikan : \(\frac{1}{k}R_{i} \rightarrow R_{i}\)
Menambahkan hasil kali baris ke-\(i\) dengan skalar \(k\) ke baris ke-\(j\), dinotasikan : \(kR_{i} +R_{j}\rightarrow R_{j}\)
Menambahkan hasil kali baris ke-\(j\) dengan skalar \(-k\) ke baris ke-\(i\), dinotasikan : \(-kR_{j} +R_{i}\rightarrow R_{i}\)
Operasi-operasi pada ruas kanan tabel di atas dinamakan operasi invers. Lalu apa kegunaan dari operasi tersebut?
Operasi tersebut berguna untuk mencari invers dari suatu matriks dengan menggunakan matriks elementer. Namun kita tidak akan membahasnya di postingan ini. Untuk teorema selanjutnya juga tidak kalah penting dari teorema matriks elementer yang pertama.
Teorema 2
Setiap matriks elementer adalah invertible (dapat dibalik / mempunyai invers) dan inversnya adalah juga matriks elementer.
Maksud dari teorema 2 adalah ketika ada matriks elementer \(E_{1}\) yang dihasilkan dengan memperagakan sebuah OBE (kita namakan operasi *) pada \(I\). Kemudian kita gunakan operasi invers–nya (kita namakan operasi **) pada matriks satuan \(I\) maka akan menghasilkan matriks elementer \(E_{2}\) mengingat operasi invers pada pembahasan saat ini juga merupakan operasi baris elementer.
Sehingga berdasarkan teorema 1 maka jika matriks \(E_{1}\) dikalikan dengan \(E_{2}\) maka diperoleh :
$$E_{1}E_{2}=1\dots(i)$$
Gambaran secara kasarnya yaitu efek operasi (*) akan dikenakan pada matriks \(E_{2}\) sehingga operasi (*) dan operasi (**) akan bertemu dan saling “meniadakan” dan menyisakan matriks satuan \(I\).
Kemudian dengan cara yang sama jika kita mengalikan matriks \(E_{2}\) dengan \(E_{1}\) maka juga diperoleh :
$$E_{1}E_{2}=1\dots(ii)$$
Berdasarkan sifat invers pada matriks yaitu jika \(AB =BA =I\) maka matriks \(B = A^{-1}\) atau \(A = B^{-1}\).
Sehingga berdasarkan persamaan \((i)\) dan \((ii)\) maka didapat \(E_{1}E_{2} =E_{2}E_{1} =I\) dan \(E_{1} = E_{2}^{-1}\) atau \(E_{2} = E_{1}^{-1}\). Jadi benar bahwa matriks elementer dapat dibalik dan inversnya juga merupakan matriks elementer.
Contoh :
Misalkan didefinisikan matriks elementer \(E_{1}\) dan \(E_{2}\) sebagai berikut.
Karena jika biasanya dalam mencari invers suatu matriks perlu mencari determinan lalu mencari transpose matriks adjoint dan seterusnya. Apalagi jika invers yang dicari dari matriks yang mempunyai jumlah baris dan kolom yang banyak pasti akan repot.
Suatu sistem persamaan linear disebut homogen jika konstantanya bernilai 0. Disini kita membedakan konstanta dan koefisien, dimana konstanta pada umumnya berada pada ruas kanan persamaan sedangkan koefisien “berdampingan” dengan variabel.
Pada umumnya suatu sistem persamaan linear dapat dituliskan :
Dengan \(a_{ij}\) menyatakan koefisien, \(x_{j}\) menyatakan variabel dan \(b_{i}\)menyatakan konstanta untuk setiap \(i=\{1,2,3,\dots,m\}~\text{dan}~j=\{1,2,3,\dots,n\}\). SPL tersebut dinyatakan homogen jika \(b_{i}=0\) atau dapat ditulis kembali :
$$a_{11}x_{1}+a_{12}x_{2}+\dots+a_{1n}x_{n} =0$$
$$a_{21}x_{1}+a_{22}x_{2}+\dots+a_{2n}x_{n} =0$$
$$\vdots$$
$$a_{m1}x_{1}+a_{m2}x_{2}+\dots+a_{mn}x_{n} =0$$
Contoh 1 :
$$5x_{1} -2x_{2} +x_{3} -3x_{4}=0$$
$$2x_{1} + x_{2} -x_{3} -7x_{4}=0$$
$$2x_{2} – 3x_{3} =0$$
$$3x_{2} +4x_{3} +x_{4}=0$$
Bisakah anda mencari solusi dari SPL diatas tanpa menggunakan metode Operasi Baris Elementer ?
Contoh 2 :
$$3x+y-z=0$$
$$5x-2y+z=0$$
$$2x+3y+2=0$$
Pada contoh kedua, sistem tersebut tidak bersifat homogen, sebab jika kita perhatikan pada persamaan ketiga terdapat konstanta yang bernilai tidak nol melainkan bernilai 2.
Teorema 1 (Sistem Persamaan Linear Homogen bersifat Konsisten)
Suatu sistem persamaan linear homogen bersifat konsisten karena terdapat satu solusi yang diperoleh dengan mengatur setiap variabel bernilai nol.
Bukti :
Atur setiap variabel bernilai nol, maka ketika kita menggantikan nilai variabel pada setiap persamaan, maka ruas kiri akan menghasilkan nol, tak peduli apapun koefisiennya. Kemudian karena sistem persamaan linear homogen mempunyai konstanta di ruas kanan bernilai nol akibatnya setiap persamaan bernilai benar dan karena setidaknya mempunyai satu solusi (semua variabel bernilai nol) maka sistem persamaan linear homogen bersifat konsisten.
Definisi Solusi Trivial dalam SPL Homogen
Dikutip dari halaman wikipedia arti kata trivial merupakan hal yang sepele, biasa dan tidak penting. Jadi dapat dikatakan solusi trivial merupakan solusi yang “biasa-biasa saja” bukan hal yang istimewa.
Definisi :
Misalkan terdapat sistem persamaan linear homogen dengan \(n\) variabel. Maka solusi dengan \(x_{1}=0,~x_{2}=0,~x_{3}=0,\dots,x_{n}=0\) disebut juga solusi trivial.
Teorema 2 (SPL Homogen dengan Variabel > Persamaan)
Misalkan terdapat suatu persamaan linear homogen mempunyai \(m\) persamaan dan \(n\) variabel dengan \(n > m\). Maka sistem tersebut mempunyai tak hingga banyaknya solusi.
Dari sistem di atas terdapat 2 persamaan dan 3 variabel. Selanjutnya kita akan mengecek apakah benar sistem tersebut mempunyai tak hingga banyaknya solusi ?
Persamaan \((i)\) dan \((ii)\) dapat pula dituliskan sebagai :
$$x=\frac{2}{3}z$$
$$y=-\frac{16}{9}z$$
Sehingga jika kita tetapkan \(z = k\) untuk sebarang bilangan \(k\) maka diperoleh himpunan penyelesaian sebagai berikut :
$$\text{HP}=\{(x,y,z)\mid x=\frac{2}{3}z,~y=-\frac{16}{9}z,~\forall~\text{sembarang bilangan z}\}$$
atau
$$\text{HP}=\{(x,y,z)\mid x=\frac{2}{3}k,~y=-\frac{16}{9}k,~z=k,~\forall~\text{sembarang bilangan k}\}$$
Jelas dengan melihat himpunan penyelesaian di atas, sistem persamaan linear homogen pada soal mempunyai tak hingga banyaknya solusi.
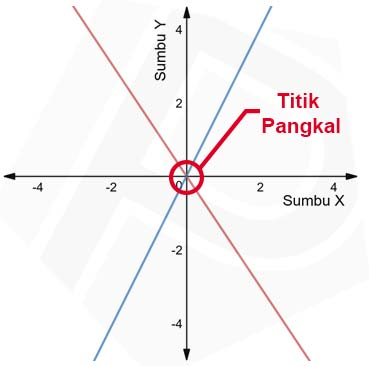
Grafik SPL Homogen
Suatu sistem persamaan linear homogen mempunyai solusi trivial sehingga apabila setiap persamaanya dilukiskan kedalam suatu grafik maka grafiknya akan melewati titik pangkal (titik asal atau titik koordinat kartesius).
Catatan : SPL 2 variabel grafiknya berupa garis-garis, SPL 3 variabel grafiknya berupa bidang-bidang sedangkan untuk SPL dengan variabel lebih dari 3 belum memungkinkan untuk dilukiskan.
Contoh :
Diberikan SPL homogen 2 variabel sebagai berikut :
$$\color{red}{3x+2y=0}$$
$$\color{blue}{2x-y=0}$$
Grafiknya :
Contoh 2 :
Diberikan SPL homogen 3 variabel sebagai berikut :
$$\color{red}{4x-2y+3z=0}$$
$$\color{blue}{2x-y-5z=0}$$
$$\color{green}{3x+2y-2z=0}$$
Grafiknya :
Kesimpulan
SPL homogen mempunyai ciri khas yaitu konstanta-konstantanya bernilai nol.
Sistem persamaan linear homogen bersifat konsisten, selalu mempunyai solusi setidaknya satu solusi (solusi trivial).
SPL Homogen dengan banyak variabel \(>\) banyak persamaan, maka sistem tersebut mempunyai tak hingga banyaknya solusi.

 dan
dan 
![u = [uij] dengan u berordo n x 1](https://www.profematika.com/wp-content/uploads/2019/06/vektor-u-dalam-bentuk-vektor-kolom.png) dan
dan ![v = [vij]](https://www.profematika.com/wp-content/uploads/2019/06/Vektor-v-sama-dengan-vektor-nol.png)
![u + v = [uij] + [vij] =[uij + vij]](https://www.profematika.com/wp-content/uploads/2019/06/Penjumlahan-vektor-u-dan-v-pada-ruang-n-dalam-bentuk-matriks.png)
 ,
,  , dan
, dan 
 dan
dan 
 maka berlaku :
maka berlaku :




















 Dengan mensubtitusikan
Dengan mensubtitusikan

















 Contoh 2 :
Contoh 2 :